


Research Direction:
AI for Engineering Applications: Sensor systems, mission planning, robot grasping/manipulation, autonomous systems Drawing inspiration from the human vision-touch interaction that demonstrates the ability of vision in assisting tactile manipulation tasks, this project addresses the issue of 3D object recognition from tactile data whose acquisition is guided by visual information. An improved computational visual
attention model is initially applied on images collected from multiple viewpoints over the surface of an
object to identify regions that attract visual attention. Information about color, intensity, orientation,
symmetry, curvature, contrast and entropy are advantageously combined for this purpose. Interest
points are then extracted from these regions of interest using an innovative technique that takes into
consideration the best viewpoint of the object. As the movement and positioning of the tactile sensor
to probe the object surface at the identified interest points take generally a long time, the local data
acquisition is first simulated to choose the most promising approach to interpret it. To enable the
object recognition, the tactile images are analyzed with the help of various classifiers. A method
based on similarity is employed to select the best candidate tactile images to train the classifier.
Among the tested algorithms, the best performance is achieved using the k-nearest neighbor
classifier both for simulated data (87.89% for 4 objects and 75.82% for 6 objects) and real tactile
sensor data (72.25% for 4 objects and 70.47% for 6 objects).
Support:
Publications:
•
G. Rouhafzay and A.-M. Cretu, "An Application of Deep Learning to Tactile Data for Object Recognition under Visual Guidance", MDPI
Sensors, vol. 19, art. 1534, 2019, pp. 1-13, doi: 10.3390/s19071534, NEW.
•
G. Rouhafzay and A.-M. Cretu, "Object Recognition from Haptic Glance at Visually Salient Locations", IEEE Trans. Instrum. & Meas,
Mar. 2019, NEW.
•
G. Rouhafzay, and A.-M. Cretu, "A Visuo-Haptic Framework for Object Recognition Inspired from Human Tactile Perception", MDPI Int.
Electron. Conf. Sensors and Applications, Proceedings 4(47), 2019, pp. 1:7, doi:10.3390/ecsa-5-05754, NEW.
•
G. Rouhafzay and A.-M. Cretu, "A Virtual Tactile Sensor with Adjustable Precision and Size for Object Recognition", IEEE Int. Conf.
Computational Intelligence and Virtual Environments for Measurement Systems and Applications, Ottawa, Canada, 2018.
•
G. Rouhafzay, N. Pedneault and A.-M. Cretu, "A 3D Visual Attention Model to Guide Tactile Data Acquisition for Object Recognition",
accepted for publication, 4th Int. Electron. Conf. Sensors and Applications, 15-30. Nov. 2017, Sciforum El. Conf. Series, 2017.
•
N. Pedneault and A.-M. Cretu, "3D Object Recognition from Tactile Array Data Acquired at Salient Points", IEEE Int. Symp. Robotics
and Intelligent Sensors, pp. 150-156, Ottawa, Canada, 2017 (Best Paper Finalist Award).
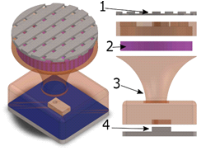
The ill-defined nature of tactile information turns tactile sensors into the last frontier to robots
that can handle everyday objects and interact with humans through contact. To overcome this
frontier many design aspects have to be considered: sensors placement,
electronic/mechanical hardware, methods to access and acquire signals, calibration, and
algorithms to process and interpret sensing data in real time. This project aims at the design
and hardware implementation of a bio-inspired tactile module that comprises a 32 taxels
array and a 9 DOF MARG (Magnetic, Angular Rate, and Gravity) sensor, a flexible compliant
structure and a deep pressure sensor.
Publications:
•
T. E. A. Oliveira, V. P. Fonseca, B.M.R. Lima, A.-M. Cretu and E. M. Petriu, "End-
Effector Approach Flexibilization in a Surface Exploration Task Using a Bioinspired Tactile Sensing Module", IEEE Int. Symp. Robotics
and Sensor Environments, Ottawa, pp. 177-182, 2019, NEW.
•
T.E.A. Oliveira, A.-M. Cretu and E.M. Petriu, "A Multi-Modal Bio-Inspired Tactile Sensing Module for Surface Characterization", MDPI
Sensors, vol. 17, art. 1187, 2017, doi: 10.3390/s17061187.
•
T.E.A. Oliveira, A.-M. Cretu and E.M. Petriu, “Multi-Modal Bio-Inspired Tactile Module”, IEEE Sensors, vol.17, issue 11, pp. 3231-3243,
Apr. 2017.
•
T.E.A. Oliveira, B.M.R. Lima, A.-M. Cretu and E.M. Petriu, "Tactile Profile Classification Using a Multimodal MEMs-Based Sensing
Module", 3rd Int. Electron. Conf. Sensors and Applications, 15-30. Nov. 2016, Sciforum El. Conf. Series, Vol. 3, 2016, E007, doi:
10.3390/ecsa-3-E007
•
T.E.A. Oliveira, V.P. Fonseca, A.-M. Cretu, E.M. Petriu, “Multi-Modal Bio-Inspired Tactile Module”, UOttawa Graduate and Research
Day, University of Ottawa, Mar. 2016 (Research Poster Prize in Electrical Engineering, first place; IEEE Research Poster Prize, first
place).
Robots are expected to recognize the properties of objects in order to handle
them safely and efficiently in a variety of applications, such as health and elder
care, manufacturing, or high-risk environments. This project explores the issue
of surface characterization by monitoring the signals acquired by a novel bio-
inspired tactile probe in contact with ridged surfaces. The tactile module
comprises a 9-DOF MEMS MARG (Magnetic, Angular Rate, and Gravity)
system and a deep MEMS pressure sensor embedded in a compliant structure
that mimics the function and the organization of mechanoreceptors in human
skin as well as the hardness of the human skin. When the modules tip slides over
a surface, the MARG unit vibrates and the deep pressure sensor captures the overall normal force
exerted. The module is evaluated in two experiments. The first experiment compares the frequency
content of the data collected in two setups: one when the module is mounted over a linear motion carriage
that slides four grating patterns at constant velocities; the second when the module is carried by a robotic
finger in contact with the same grating patterns while performing a sliding motion, similar to the exploratory
motion employed by humans to detect object roughness. As expected, in the linear setup, the magnitude
spectrum of the sensors' output shows that the module can detect the applied stimuli with frequencies
ranging from 3.66Hz to 11.54Hz with an overall maximum error of ±0.1Hz. The second experiment shows
how localized features extracted from the data collected by the robotic finger setup over seven synthetic
shapes can be used to classify them. The classification method consists on applying multiscale principal
components analysis prior to the classification with a multilayer neural network. Achieved accuracies from 85.1% to 98.9% for the various
sensor types demonstrate the usefulness of traditional MEMS as tactile sensors embedded into flexible substrates.
Publications:
•
T.E.A. Oliveira, A.-M. Cretu and E.M. Petriu, "A Multi-Modal Bio-Inspired Tactile Sensing Module for Tactile Surface Characterization",
MPDI Sensors, vol. 17, art. 1187, 2017, doi: 10.3390/s17061187.
•
T.E.A. Oliveira, B.M.R. Lima, A.-M. Cretu and E.M. Petriu, "Tactile Profile Classification Using a Multimodal MEMs-Based Sensing
Module", 3rd Int. Electron. Conf. Sensors and Applications, 15-30. Nov. 2016, Sciforum El. Conf. Series, Vol. 3, 2016, E007, doi:
10.3390/ecsa-3-E007.
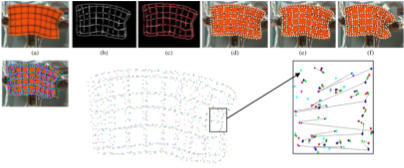
The project addresses the issues of the design and implementation of an
automated framework that provides the necessary information to the controller of a
robotic hand to ensure safe model-based 3D deformable object manipulation.
Measurements corresponding to the interaction force at the level of the fingertips
and to the position of the fingertips of a three-fingered robotic hand are associated
with the contours of a deformed object tracked in a series of images using neural-
network approaches. The resulting model not only captures the behavior of the
object but is also able to predict its behavior for previously unseen interactions
without any assumption on the object’s material. Such models allow the controller
of the robotic hand to achieve better controlled grasp and more elaborate
manipulation capabilities.
Publications:
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Soft Object Deformation Monitoring and Learning for Model-Based Robotic Hand
Manipulation”, IEEE Trans. Systems, Man and Cybernetics - Part B, vol. 42, no. 3, Jun. 2012.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Learning and Prediction of Soft Object Deformation using Visual Analysis of Robot
Interaction”, Proc. Int. Symp. Visual Computing, ISVC2010, Las Vegas, Nevada, USA, G. Bebis et al. (Eds), LNCS 6454, pp. 232-241,
Springer, 2010.
•
F. Khalil, P. Payeur, and A.-M. Cretu, “Integrated Multisensory Robotic Hand System for Deformable Object Manipulation”, Proc. Int.
Conf. Robotics and Applications, pp. 159-166, Cambridge, Massachusetts, US, 2010.
•
A.-M. Cretu, P. Payeur, E. M. Petriu and F. Khalil, “Estimation of Deformable Object Properties from Visual Data and Robotic Hand
Interaction Measurements for Virtualized Reality Applications ”, Proc. IEEE Int. Symp. Haptic Audio Visual Environments and Their
Applications, pp.168-173, Phoenix, AZ, Oct. 2010.
•
A.-M. Cretu, P. Payeur, E. M. Petriu and F. Khalil, “Deformable Object Segmentation and Contour Tracking in Image Sequences Using
Unsupervised Networks”, Proc. Canadian Conf. Computer and Robot Vision, pp. 277-284, Ottawa, Canada, May 2010.
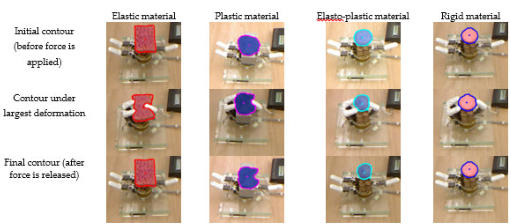
Performing tasks with a robot hand often requires a
complete knowledge of the manipulated object,
including its properties (shape, rigidity, surface
texture) and its location in the environment, in order
to ensure safe and efficient manipulation. While well-
established procedures exist for the manipulation of
rigid objects, as well as several approaches for the
manipulation of linear or planar deformable objects
such as ropes or fabric, research addressing the
characterization of deformable objects occupying a
volume remains relatively limited. The project
proposes an approach for tracking the deformation
of non-rigid objects under robot hand manipulation
using RGB-D data. The purpose is to automatically
classify deformable objects as rigid, elastic, plastic,
or elasto-plastic, based on the material they are made of, and to support recognition of the category of such objects through a robotic probing
process in order to enhance manipulation capabilities. The proposed approach combines advantageously classical color and depth image
processing techniques and proposes a novel combination of the fast level set method with a log-polar mapping of the visual data to robustly
detect and track the contour of a deformable object in a RGB-D data stream. Dynamic time warping is employed to characterize the object
properties independently from the varying length of the tracked contour as the object deforms. The proposed solution achieves a classification
rate over all categories of material of up to 98.3%. When integrated in the control loop of a robot hand, it can contribute to ensure stable grasp,
and safe manipulation capability that will preserve the physical integrity of the object.
Collaborators:
Publications:
•
F. Hui, P. Payeur and A.-M. Cretu, "Visual Tracking and Classification of Soft Object Deformation under Robot Hand Interaction", MDPI
Robotics, vol. 6, issue 1, art. 5, 2017, doi: 10.3390/robotics6010005.
•
F. Hui, P. Payeur, and A.-M. Cretu, "In-Hand Object Material Characterization with Fast Level Set in Log-Polar Domain and Dynamic
Time Warping", IEEE Int. Conf. Instrumentation and Measurement Technology, pp. 730-735,Torino, Italy, May 2017.
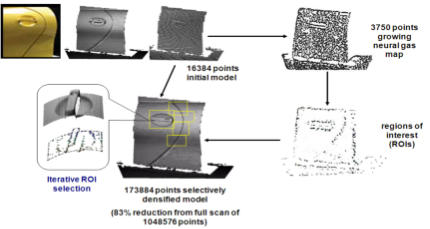
This project explores some aspects of intelligent sensing for advanced
robotic applications, with the main objective of designing innovative
approaches for automatic selection of regions of observation for fixed and
mobile sensors to collect only relevant measurements without human
guidance. The proposed neural gas network solution selects regions of
interest for further sampling from a cloud of sparsely collected 3D
measurements. The technique automatically determines bounded areas
where sensing is required at higher resolution to accurately map 3D
surfaces. Therefore it provides significant benefits over brute force strategies
as scanning time is reduced and the size of the dataset is kept manageable.
Collaborators/ Support:
Publications:
•
P. Payeur, P. Curtis, A.-M. Cretu, "Computational Methods for Selective
Acquisition of Depth Measurements: an Experimental Evaluation", Int. Conf. Advanced Concepts for Intelligent Vision Systems,
Poznan, Poland, J. Blanc-Talon et al. (Eds.) LNCS 8192, pp. 389-401, 2013.
•
P. Payeur, P. Curtis, A.-M. Cretu, "Computational Methods for Selective Acquisition of Depth Measurements in Machine Perception",
IEEE Int. Conf. Systems, Man, and Cybernetics, Manchester, UK, pp.876-881, 2013.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Selective Range Data Acquisition Driven by Neural Gas Networks”, IEEE Trans.
Instrumentation and Measurement, vol. 58, no. 6, pp. 2634-2642, 2009.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Neural Gas and Growing Neural Gas Networks for Selective 3D Sensing: A Comparative
Study”, Sensors & Transducers, vol. 5, pp. 119-134, 2009.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Selective Tactile Data Acquisition on 3D Deformable Objects for Virtualized Reality
Applications”, Proc. IEEE Int. Workshop Computational Intelligence in Virtual Environments, pp.14-19, Nashville, TN, USA, Apr. 2009
•
A.-M. Cretu, E.M. Petriu, and P. Payeur, “Growing Neural Gas Networks for Selective 3D Scanning”, Proc. IEEE Int. Workshop on
Robotic and Sensors Environments, pp. 108-113, Ottawa, Canada, Oct. 2008.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Selective Vision Sensing Based on Neural Gas Network”, Proc. IEEE Int. Conf.
Instrumentation and Measurement Technology, pp. 478-483, Vancouver, Canada, May 2008 (Best Student Paper Award).
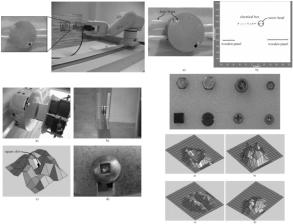
Controlling robotic interventions on small devices creates important challenges on the sensing stage as
resolution limitations of non-contact sensors are rapidly reached. The integration of haptic sensors to
refine information provided by vision sensors appears as a very promising approach in the development
of autonomous robotic systems as it reproduces the multiplicity of sensing sources used by humans. This
project proposes an intelligent multimodal sensor system developed to enhance the haptic-control of
robotic manipulations of small 3D objects. The proposed system combines a 16x16 array of Force
Sensing Resistor
(FSR) elements to refine 3D shape measurements in selected areas previously monitored with a laser
range finder. Using the integrated technologies, the sensor system is able to recognize small-size objects
that cannot be accurately differentiated through range measurements and provides an estimate of the
objects orientation. Characteristics of the system are demonstrated in the context of a robotic intervention
that requires fine objects to be localized and identified for their shape and orientation.
Publications:
•
P. Payeur, C. Pasca, A.-M. Cretu, and E.M. Petriu, “Intelligent Haptic Sensor System for Robotic
Manipulation”, IEEE Trans. Instrumentation and Measurement, vol. 54, no. 4, pp. 1583-1592, 2005.
•
C. Pasca, P. Payeur, E.M. Petriu, A.-M. Cretu, “Intelligent Haptic Sensor System for Robotic Manipulation”, Proc. IEEE Int. Conf.
Instrumentation and Measurement Technology, pp. 279-284, Italy, 2004.
•
E. M. Petriu, S.K.S. Yeung, S.R. Das, A.-M. Cretu, and H.J.W. Spoelder, “Robotic Tactile Recognition of Pseudo-Random Encoded
Objects”, IEEE Trans. Instrumentation and Measurement, vol. 53, no. 5, pp. 1425-1432, 2004.
This project addresses issues inherent to the design of navigation planning and control systems required for
adaptive monitoring of pollutants in inland waters. It proposes a new system for estimating water
quality, in particular the chlorophyll-A concentration, by using satellite remote sensing data. The aim
is to develop an intelligent model based on supervised learning, with the goal of improving the
precision of the evaluation of chlorophyll-A concentration. To achieve this, an intelligent system
based on statistical learning is employed to classify the waters a priori, before estimating the
chlorophyll-A concentration with neural network models. A control architecture is proposed to guide
the trajectory of an aquatic platform to collect in-situ measurements It uses a multi-model
classification/regression system to determine and forecast the spatial distribution of chlorophyll-A.
At the same time, the proposed architecture features a cost optimizing path planner. The approach
is validated using data collected on Lake Winnipeg in Canada.
Collaborators:
Publication:
•
F. Halal, P. Pedrocca, T. Hirose, A.-M. Cretu, M. Zaremba, "Remote-Sensing Based Adaptive Path Planning for an Aquatic Platform to
Monitor Water Quality", IEEE Symp. Robotic and Sensors Environments, pp. 43-48, Timisoara, Romania, Oct. 2014.
This project addresses the problem of node selection using computational intelligence techniques for a risk-aware
robotic sensor networks applied to critical infrastructure protection. The goal is to maintain a secure perimeter around
a critical infrastructure, which is best maintained by detecting high-risk network events and mitigate them through a
response involving the most suitable robotic assets.
Collaborators:
Publications:
•
J. McCausland, R. Abielmona, R. Falcon, A.-M. Cretu and E.M. Petriu, "On the Role of Multi-Objective Optimization in Risk Mitigation
for Critical Infrastructures with Robotic Sensor Networks", accepted for publication, ACM Conference Companion on Genetic and
Evolutionary Computation, Vancouver, Canada, pp. 1269-1276, July 2014.
•
J. McCausland, R. Abielmona, A. -M. Cretu, Rafael Falcon, and E.M. Petriu, “A Proactive Risk-Aware Robotic Sensor Network for
Critical Infrastructure Protection”, poster session, 2013 Annual Research Review Healthcare Support through Information Technology
Enhancements (hSITE), Montreal, QC, 18 Nov. 2013,
•
J. McCausland, R. Abielmona, R. Falcon, A.-M. Cretu and E.M. Petriu, "Auction-Based Node Selection of Optimal and Concurrent
Responses for a Risk-Aware Robotic Sensor Network", IEEE Int. Symp. Robotic and Sensors Environments, Washington, US, pp. 136-
141. 21-23 Oct. 2013.
Installation of large solar photovoltaic (PV) systems is becoming common in cold climate regions with significant
amount of snowfall. To better understand the effect of degradation in electrical performance of PV cells associated with
the presence of snowfall, accurate modeling of snow-covered photovoltaic modules is vitally necessary. In this paper, a
novel methodology of PV modeling is proposed to represent the instantaneous electrical characteristics of uniformly
snow-covered PV modules. The attenuation of transmitted solar radiation penetrating a layer of snow is rigorously
estimated based on the Giddings and LaChapelle theory. This approach introduced the level of radiation that reaches
to the surface of PV module through snowpack, significantly affected by the snow properties and thickness. The
proposed modeling approach is based on the popular single-diode-five-parameter equivalent circuit model. The
parameters of the model are updated through instantaneous measurements of voltage and current that are optimized
by the particle swarm optimization (PSO) algorithm. The proposed approach for modeling snow-covered PV modules
was successfully validated in outdoor tests using three different types of PV module technologies typically used in
North America's PV farms under different cold weather conditions. In addition, the validity of proposed model was
investigated using real data obtained from the SCADA system of a 12-MW grid-connected PV farm. The proposed
model can help improving PV performance under snow conditions and can be considered a powerful tool for the design
and selection of PV modules subjected to snow accretion.
Publications:
•
M. Khenar, K. Hosseini, S. Taheri, A.-M. Cretu, E. Pouresmaeil, and H. Taheri, "Particle Swarm Optimization-
based Model and Analysis of Photovoltaic Module Characteristics in Snowy Conditions", accepted for
publication, IET Renewable Power Generation, Mar. 2019, NEW.
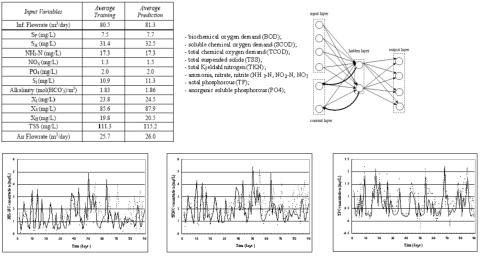
The inherent complex nature of the wastewater treatment process,
the lack of proper knowledge and description of the biological
phenomena and the large fluctuations in time of the numerous
parameters implied (flow-rates and nutrients loadings) makes the
automatic control of a wastewater plant a complicated and difficult
problem to tackle. The use of online sensors for continuous
measurement of wastewater components is prone to unpredictable
breakdowns. Low nutrient conditions in a wastewater treatment
plant may cause the failure of the effective nitrogen and
phosphorus removal for a considerable period. This project
proposes neural-network modeling approaches for the model-
based control of a wastewater treatment plant in terms of air flow-
rate and municipal wastewater components.
Publications:
•
K-Y. Ko, G.G. Patry, A.-M. Cretu, and E.M. Petriu, “Neural
Network Model of Municipal Wastewater Components for a
Wastewater Treatment Plant”, Proc. IEEE Int. Workshop on
Advanced Environmental Sensing and Monitoring Techniques, pp. 23-28, Como, Italy, Jul. 2003.
•
K.-Y. Ko, G.G. Patry, A.-M. Cretu, E.M. Petriu, “Neural Network Model for Wastewater Treatment Plant Control”, Proc. IEEE Int.
Workshop on Soft Computing Techniques in Instrumentation, Measurement and Related Applications, pp. 38-43, May 2003.
tactile data whose acquisition is guided by visual information. An improved computational visual
attention model is initially applied on images collected from multiple viewpoints over the surface of an
object to identify regions that attract visual attention. Information about color, intensity, orientation,
symmetry, curvature, contrast and entropy are advantageously combined for this purpose. Interest
points are then extracted from these regions of interest using an innovative technique that takes into
consideration the best viewpoint of the object. As the movement and positioning of the tactile sensor
to probe the object surface at the identified interest points take generally a long time, the local data
acquisition is first simulated to choose the most promising approach to interpret it. To enable the
object recognition, the tactile images are analyzed with the help of various classifiers. A method
based on similarity is employed to select the best candidate tactile images to train the classifier.
Among the tested algorithms, the best performance is achieved using the k-nearest neighbor
classifier both for simulated data (87.89% for 4 objects and 75.82% for 6 objects) and real tactile
sensor data (72.25% for 4 objects and 70.47% for 6 objects).
Support:
Publications:
•
G. Rouhafzay and A.-M. Cretu, "An Application of Deep Learning to Tactile Data for Object Recognition under Visual Guidance", MDPI
Sensors, vol. 19, art. 1534, 2019, pp. 1-13, doi: 10.3390/s19071534, NEW.
•
G. Rouhafzay and A.-M. Cretu, "Object Recognition from Haptic Glance at Visually Salient Locations", IEEE Trans. Instrum. & Meas,
Mar. 2019, NEW.
•
G. Rouhafzay, and A.-M. Cretu, "A Visuo-Haptic Framework for Object Recognition Inspired from Human Tactile Perception", MDPI Int.
Electron. Conf. Sensors and Applications, Proceedings 4(47), 2019, pp. 1:7, doi:10.3390/ecsa-5-05754, NEW.
•
G. Rouhafzay and A.-M. Cretu, "A Virtual Tactile Sensor with Adjustable Precision and Size for Object Recognition", IEEE Int. Conf.
Computational Intelligence and Virtual Environments for Measurement Systems and Applications, Ottawa, Canada, 2018.
•
G. Rouhafzay, N. Pedneault and A.-M. Cretu, "A 3D Visual Attention Model to Guide Tactile Data Acquisition for Object Recognition",
accepted for publication, 4th Int. Electron. Conf. Sensors and Applications, 15-30. Nov. 2017, Sciforum El. Conf. Series, 2017.
•
N. Pedneault and A.-M. Cretu, "3D Object Recognition from Tactile Array Data Acquired at Salient Points", IEEE Int. Symp. Robotics
and Intelligent Sensors, pp. 150-156, Ottawa, Canada, 2017 (Best Paper Finalist Award).
The ill-defined nature of tactile information turns tactile sensors into the last frontier to robots
that can handle everyday objects and interact with humans through contact. To overcome this
frontier many design aspects have to be considered: sensors placement,
electronic/mechanical hardware, methods to access and acquire signals, calibration, and
algorithms to process and interpret sensing data in real time. This project aims at the design
and hardware implementation of a bio-inspired tactile module that comprises a 32 taxels
array and a 9 DOF MARG (Magnetic, Angular Rate, and Gravity) sensor, a flexible compliant
structure and a deep pressure sensor.
Publications:
•
T. E. A. Oliveira, V. P. Fonseca, B.M.R. Lima, A.-M. Cretu and E. M. Petriu, "End-
Effector Approach Flexibilization in a Surface Exploration Task Using a Bioinspired Tactile Sensing Module", IEEE Int. Symp. Robotics
and Sensor Environments, Ottawa, pp. 177-182, 2019, NEW.
•
T.E.A. Oliveira, A.-M. Cretu and E.M. Petriu, "A Multi-Modal Bio-Inspired Tactile Sensing Module for Surface Characterization", MDPI
Sensors, vol. 17, art. 1187, 2017, doi: 10.3390/s17061187.
•
T.E.A. Oliveira, A.-M. Cretu and E.M. Petriu, “Multi-Modal Bio-Inspired Tactile Module”, IEEE Sensors, vol.17, issue 11, pp. 3231-3243,
Apr. 2017.
•
T.E.A. Oliveira, B.M.R. Lima, A.-M. Cretu and E.M. Petriu, "Tactile Profile Classification Using a Multimodal MEMs-Based Sensing
Module", 3rd Int. Electron. Conf. Sensors and Applications, 15-30. Nov. 2016, Sciforum El. Conf. Series, Vol. 3, 2016, E007, doi:
10.3390/ecsa-3-E007
•
T.E.A. Oliveira, V.P. Fonseca, A.-M. Cretu, E.M. Petriu, “Multi-Modal Bio-Inspired Tactile Module”, UOttawa Graduate and Research
Day, University of Ottawa, Mar. 2016 (Research Poster Prize in Electrical Engineering, first place; IEEE Research Poster Prize, first
place).
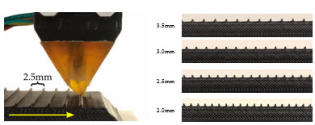
Robots are expected to recognize the properties of objects in order to handle
them safely and efficiently in a variety of applications, such as health and elder
care, manufacturing, or high-risk environments. This project explores the issue
of surface characterization by monitoring the signals acquired by a novel bio-
inspired tactile probe in contact with ridged surfaces. The tactile module
comprises a 9-DOF MEMS MARG (Magnetic, Angular Rate, and Gravity)
system and a deep MEMS pressure sensor embedded in a compliant structure
that mimics the function and the organization of mechanoreceptors in human
skin as well as the hardness of the human skin. When the modules tip slides over
a surface, the MARG unit vibrates and the deep pressure sensor captures the overall normal force
exerted. The module is evaluated in two experiments. The first experiment compares the frequency
content of the data collected in two setups: one when the module is mounted over a linear motion carriage
that slides four grating patterns at constant velocities; the second when the module is carried by a robotic
finger in contact with the same grating patterns while performing a sliding motion, similar to the exploratory
motion employed by humans to detect object roughness. As expected, in the linear setup, the magnitude
spectrum of the sensors' output shows that the module can detect the applied stimuli with frequencies
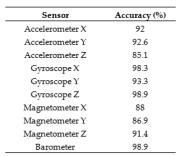
ranging from 3.66Hz to 11.54Hz with an overall maximum error of ±0.1Hz. The second experiment shows
how localized features extracted from the data collected by the robotic finger setup over seven synthetic
shapes can be used to classify them. The classification method consists on applying multiscale principal
components analysis prior to the classification with a multilayer neural network. Achieved accuracies from 85.1% to 98.9% for the various
sensor types demonstrate the usefulness of traditional MEMS as tactile sensors embedded into flexible substrates.
Publications:
•
T.E.A. Oliveira, A.-M. Cretu and E.M. Petriu, "A Multi-Modal Bio-Inspired Tactile Sensing Module for Tactile Surface Characterization",
MPDI Sensors, vol. 17, art. 1187, 2017, doi: 10.3390/s17061187.
•
T.E.A. Oliveira, B.M.R. Lima, A.-M. Cretu and E.M. Petriu, "Tactile Profile Classification Using a Multimodal MEMs-Based Sensing
Module", 3rd Int. Electron. Conf. Sensors and Applications, 15-30. Nov. 2016, Sciforum El. Conf. Series, Vol. 3, 2016, E007, doi:
10.3390/ecsa-3-E007.
The project addresses the issues of the design and implementation of an
automated framework that provides the necessary information to the controller of a
robotic hand to ensure safe model-based 3D deformable object manipulation.
Measurements corresponding to the interaction force at the level of the fingertips
and to the position of the fingertips of a three-fingered robotic hand are associated
with the contours of a deformed object tracked in a series of images using neural-
network approaches. The resulting model not only captures the behavior of the
object but is also able to predict its behavior for previously unseen interactions
without any assumption on the object’s material. Such models allow the controller
of the robotic hand to achieve better controlled grasp and more elaborate
manipulation capabilities.
Publications:
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Soft Object Deformation Monitoring and Learning for Model-Based Robotic Hand
Manipulation”, IEEE Trans. Systems, Man and Cybernetics - Part B, vol. 42, no. 3, Jun. 2012.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Learning and Prediction of Soft Object Deformation using Visual Analysis of Robot
Interaction”, Proc. Int. Symp. Visual Computing, ISVC2010, Las Vegas, Nevada, USA, G. Bebis et al. (Eds), LNCS 6454, pp. 232-241,
Springer, 2010.
•
F. Khalil, P. Payeur, and A.-M. Cretu, “Integrated Multisensory Robotic Hand System for Deformable Object Manipulation”, Proc. Int.
Conf. Robotics and Applications, pp. 159-166, Cambridge, Massachusetts, US, 2010.
•
A.-M. Cretu, P. Payeur, E. M. Petriu and F. Khalil, “Estimation of Deformable Object Properties from Visual Data and Robotic Hand
Interaction Measurements for Virtualized Reality Applications ”, Proc. IEEE Int. Symp. Haptic Audio Visual Environments and Their
Applications, pp.168-173, Phoenix, AZ, Oct. 2010.
•
A.-M. Cretu, P. Payeur, E. M. Petriu and F. Khalil, “Deformable Object Segmentation and Contour Tracking in Image Sequences Using
Unsupervised Networks”, Proc. Canadian Conf. Computer and Robot Vision, pp. 277-284, Ottawa, Canada, May 2010.
Performing tasks with a robot hand often requires a
complete knowledge of the manipulated object,
including its properties (shape, rigidity, surface
texture) and its location in the environment, in order
to ensure safe and efficient manipulation. While well-
established procedures exist for the manipulation of
rigid objects, as well as several approaches for the
manipulation of linear or planar deformable objects
such as ropes or fabric, research addressing the
characterization of deformable objects occupying a
volume remains relatively limited. The project
proposes an approach for tracking the deformation
of non-rigid objects under robot hand manipulation
using RGB-D data. The purpose is to automatically
classify deformable objects as rigid, elastic, plastic,
or elasto-plastic, based on the material they are made of, and to support recognition of the category of such objects through a robotic probing
process in order to enhance manipulation capabilities. The proposed approach combines advantageously classical color and depth image
processing techniques and proposes a novel combination of the fast level set method with a log-polar mapping of the visual data to robustly
detect and track the contour of a deformable object in a RGB-D data stream. Dynamic time warping is employed to characterize the object
properties independently from the varying length of the tracked contour as the object deforms. The proposed solution achieves a classification
rate over all categories of material of up to 98.3%. When integrated in the control loop of a robot hand, it can contribute to ensure stable grasp,
and safe manipulation capability that will preserve the physical integrity of the object.
Collaborators:
Publications:
•
F. Hui, P. Payeur and A.-M. Cretu, "Visual Tracking and Classification of Soft Object Deformation under Robot Hand Interaction", MDPI
Robotics, vol. 6, issue 1, art. 5, 2017, doi: 10.3390/robotics6010005.
•
F. Hui, P. Payeur, and A.-M. Cretu, "In-Hand Object Material Characterization with Fast Level Set in Log-Polar Domain and Dynamic
Time Warping", IEEE Int. Conf. Instrumentation and Measurement Technology, pp. 730-735,Torino, Italy, May 2017.
This project explores some aspects of intelligent sensing for advanced
robotic applications, with the main objective of designing innovative
approaches for automatic selection of regions of observation for fixed and
mobile sensors to collect only relevant measurements without human
guidance. The proposed neural gas network solution selects regions of
interest for further sampling from a cloud of sparsely collected 3D
measurements. The technique automatically determines bounded areas
where sensing is required at higher resolution to accurately map 3D
surfaces. Therefore it provides significant benefits over brute force strategies
as scanning time is reduced and the size of the dataset is kept manageable.
Collaborators/ Support:
Publications:
•
P. Payeur, P. Curtis, A.-M. Cretu, "Computational Methods for Selective
Acquisition of Depth Measurements: an Experimental Evaluation", Int. Conf. Advanced Concepts for Intelligent Vision Systems,
Poznan, Poland, J. Blanc-Talon et al. (Eds.) LNCS 8192, pp. 389-401, 2013.
•
P. Payeur, P. Curtis, A.-M. Cretu, "Computational Methods for Selective Acquisition of Depth Measurements in Machine Perception",
IEEE Int. Conf. Systems, Man, and Cybernetics, Manchester, UK, pp.876-881, 2013.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Selective Range Data Acquisition Driven by Neural Gas Networks”, IEEE Trans.
Instrumentation and Measurement, vol. 58, no. 6, pp. 2634-2642, 2009.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Neural Gas and Growing Neural Gas Networks for Selective 3D Sensing: A Comparative
Study”, Sensors & Transducers, vol. 5, pp. 119-134, 2009.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Selective Tactile Data Acquisition on 3D Deformable Objects for Virtualized Reality
Applications”, Proc. IEEE Int. Workshop Computational Intelligence in Virtual Environments, pp.14-19, Nashville, TN, USA, Apr. 2009
•
A.-M. Cretu, E.M. Petriu, and P. Payeur, “Growing Neural Gas Networks for Selective 3D Scanning”, Proc. IEEE Int. Workshop on
Robotic and Sensors Environments, pp. 108-113, Ottawa, Canada, Oct. 2008.
•
A.-M. Cretu, P. Payeur, and E.M. Petriu, “Selective Vision Sensing Based on Neural Gas Network”, Proc. IEEE Int. Conf.
Instrumentation and Measurement Technology, pp. 478-483, Vancouver, Canada, May 2008 (Best Student Paper Award).
Controlling robotic interventions on small devices creates important challenges on the sensing stage as
resolution limitations of non-contact sensors are rapidly reached. The integration of haptic sensors to
refine information provided by vision sensors appears as a very promising approach in the development
of autonomous robotic systems as it reproduces the multiplicity of sensing sources used by humans. This
project proposes an intelligent multimodal sensor system developed to enhance the haptic-control of
robotic manipulations of small 3D objects. The proposed system combines a 16x16 array of Force
Sensing Resistor
(FSR) elements to refine 3D shape measurements in selected areas previously monitored with a laser
range finder. Using the integrated technologies, the sensor system is able to recognize small-size objects
that cannot be accurately differentiated through range measurements and provides an estimate of the
objects orientation. Characteristics of the system are demonstrated in the context of a robotic intervention
that requires fine objects to be localized and identified for their shape and orientation.
Publications:
•
P. Payeur, C. Pasca, A.-M. Cretu, and E.M. Petriu, “Intelligent Haptic Sensor System for Robotic
Manipulation”, IEEE Trans. Instrumentation and Measurement, vol. 54, no. 4, pp. 1583-1592, 2005.
•
C. Pasca, P. Payeur, E.M. Petriu, A.-M. Cretu, “Intelligent Haptic Sensor System for Robotic Manipulation”, Proc. IEEE Int. Conf.
Instrumentation and Measurement Technology, pp. 279-284, Italy, 2004.
•
E. M. Petriu, S.K.S. Yeung, S.R. Das, A.-M. Cretu, and H.J.W. Spoelder, “Robotic Tactile Recognition of Pseudo-Random Encoded
Objects”, IEEE Trans. Instrumentation and Measurement, vol. 53, no. 5, pp. 1425-1432, 2004.
This project addresses issues inherent to the design of navigation planning and control systems required for
adaptive monitoring of pollutants in inland waters. It proposes a new system for estimating water
quality, in particular the chlorophyll-A concentration, by using satellite remote sensing data. The aim
is to develop an intelligent model based on supervised learning, with the goal of improving the
precision of the evaluation of chlorophyll-A concentration. To achieve this, an intelligent system
based on statistical learning is employed to classify the waters a priori, before estimating the
chlorophyll-A concentration with neural network models. A control architecture is proposed to guide
the trajectory of an aquatic platform to collect in-situ measurements It uses a multi-model
classification/regression system to determine and forecast the spatial distribution of chlorophyll-A.
At the same time, the proposed architecture features a cost optimizing path planner. The approach
is validated using data collected on Lake Winnipeg in Canada.
Collaborators:
Publication:
•
F. Halal, P. Pedrocca, T. Hirose, A.-M. Cretu, M. Zaremba, "Remote-Sensing Based Adaptive Path Planning for an Aquatic Platform to
Monitor Water Quality", IEEE Symp. Robotic and Sensors Environments, pp. 43-48, Timisoara, Romania, Oct. 2014.
This project addresses the problem of node selection using computational intelligence techniques for a risk-aware
robotic sensor networks applied to critical infrastructure protection. The goal is to maintain a secure perimeter around
a critical infrastructure, which is best maintained by detecting high-risk network events and mitigate them through a
response involving the most suitable robotic assets.
Collaborators:
Publications:
•
J. McCausland, R. Abielmona, R. Falcon, A.-M. Cretu and E.M. Petriu, "On the Role of Multi-Objective Optimization in Risk Mitigation
for Critical Infrastructures with Robotic Sensor Networks", accepted for publication, ACM Conference Companion on Genetic and
Evolutionary Computation, Vancouver, Canada, pp. 1269-1276, July 2014.
•
J. McCausland, R. Abielmona, A. -M. Cretu, Rafael Falcon, and E.M. Petriu, “A Proactive Risk-Aware Robotic Sensor Network for
Critical Infrastructure Protection”, poster session, 2013 Annual Research Review Healthcare Support through Information Technology
Enhancements (hSITE), Montreal, QC, 18 Nov. 2013,
•
J. McCausland, R. Abielmona, R. Falcon, A.-M. Cretu and E.M. Petriu, "Auction-Based Node Selection of Optimal and Concurrent
Responses for a Risk-Aware Robotic Sensor Network", IEEE Int. Symp. Robotic and Sensors Environments, Washington, US, pp. 136-
141. 21-23 Oct. 2013.
Installation of large solar photovoltaic (PV) systems is becoming common in cold climate regions with significant
amount of snowfall. To better understand the effect of degradation in electrical performance of PV cells associated with
the presence of snowfall, accurate modeling of snow-covered photovoltaic modules is vitally necessary. In this paper, a
novel methodology of PV modeling is proposed to represent the instantaneous electrical characteristics of uniformly
snow-covered PV modules. The attenuation of transmitted solar radiation penetrating a layer of snow is rigorously
estimated based on the Giddings and LaChapelle theory. This approach introduced the level of radiation that reaches
to the surface of PV module through snowpack, significantly affected by the snow properties and thickness. The
proposed modeling approach is based on the popular single-diode-five-parameter equivalent circuit model. The
parameters of the model are updated through instantaneous measurements of voltage and current that are optimized
by the particle swarm optimization (PSO) algorithm. The proposed approach for modeling snow-covered PV modules
was successfully validated in outdoor tests using three different types of PV module technologies typically used in
North America's PV farms under different cold weather conditions. In addition, the validity of proposed model was
investigated using real data obtained from the SCADA system of a 12-MW grid-connected PV farm. The proposed
model can help improving PV performance under snow conditions and can be considered a powerful tool for the design
and selection of PV modules subjected to snow accretion.
Publications:
•
M. Khenar, K. Hosseini, S. Taheri, A.-M. Cretu, E. Pouresmaeil, and H. Taheri, "Particle Swarm Optimization-
based Model and Analysis of Photovoltaic Module Characteristics in Snowy Conditions", accepted for
publication, IET Renewable Power Generation, Mar. 2019, NEW.
The inherent complex nature of the wastewater treatment process,
the lack of proper knowledge and description of the biological
phenomena and the large fluctuations in time of the numerous
parameters implied (flow-rates and nutrients loadings) makes the
automatic control of a wastewater plant a complicated and difficult
problem to tackle. The use of online sensors for continuous
measurement of wastewater components is prone to unpredictable
breakdowns. Low nutrient conditions in a wastewater treatment
plant may cause the failure of the effective nitrogen and
phosphorus removal for a considerable period. This project
proposes neural-network modeling approaches for the model-
based control of a wastewater treatment plant in terms of air flow-
rate and municipal wastewater components.
Publications:
•
K-Y. Ko, G.G. Patry, A.-M. Cretu, and E.M. Petriu, “Neural
Network Model of Municipal Wastewater Components for a
Wastewater Treatment Plant”, Proc. IEEE Int. Workshop on
Advanced Environmental Sensing and Monitoring Techniques, pp. 23-28, Como, Italy, Jul. 2003.
•
K.-Y. Ko, G.G. Patry, A.-M. Cretu, E.M. Petriu, “Neural Network Model for Wastewater Treatment Plant Control”, Proc. IEEE Int.
Workshop on Soft Computing Techniques in Instrumentation, Measurement and Related Applications, pp. 38-43, May 2003.

Research
© Ana-Maria Cretu 2019
Ana-Maria Cretu

Risk-aware wireless sensor network for critical infrastructure protection




Remote-sensing based adaptive path planning for a ship to monitor water quality



Tactile surface characterization and recognition
Pattern classification and recognition from tactile data



Visual attention guided tactile object recognition




Multimodal biologically-inspired tactile sensing


Deformable object tracking and modeling for robotic hand manipulation

Deformable object tracking for material characterization


Selective range data acquisition


Neural network models for wastewater treatment plant control

PSO-based study of photovoltaic panels in cold conditions

















